The drone industry has made much progress in the last two years; something I experienced for myself when researching the regulatory situation on drone communication standards. Over the 11-month duration of the study, the “current situation” changed no less than five times! It’s not surprising that the industry has been likened to the ‘wild west’ by some[1] and that regulatory and standardisation bodies have struggled to keep up. Given the pace of change and the rivers to cross, are we any further on now than we were in 2019 – particularly when it comes to communications and interoperability?
CNS - does one size fit all?
Tracking small drones is a challenge because they are too small to be detected by contemporary primary radars. If cooperative surveillance is to be used it must be optimised in terms of (emitter) weight and price, otherwise the specific use cases for smaller drones, like urban air delivery, are just not feasible. What’s more, the Communications Navigation and Surveillance (CNS) technology will need to be built to an interoperable standard across different geographies and airspace users, giving rise to further challenges. Drones are expected to share the airspace with manned traffic or to operate in neighbouring airspaces like Very Low Level airspace, close enough to need to cooperate with manned aviation, and air navigation service providers.
The holy grail of the drone industry is operations beyond visual line of sight (BVLOS). When the drone is not constrained by the pilot’s (or observer’s) position it can do so much more! Of course, without the pilot’s direct view the drone operator is even more reliant on information provided by sensors and CNS systems, which are proven and vital components in aviation safety.
CNS in a drone context is completely intertwined with and underpinned by the communication system. Navigation is primarily derived from messages sent from satellites and surveillance is achieved cooperatively by position reports (messages again). These (position reports) are especially important as the whole concept of “see-and-avoid” turns into “detect-and-avoid” when drones are operating BVLOS.
So, given that drones will ideally be sharing the airspace with manned traffic, and not segregated, what tools can safely integrate the two? In shared airspace, all stakeholders (users and service providers) must communicate. On the one hand, there is a need to integrate new users (drones), but on the other, the system is reaching capacity and we need to find alternative solutions. The problem is that the aviation spectrum, which hosts VHF communication, has already reached capacity. It hosts all legacy navigation infrastructure like VORs, NDBs or DMEs, including legacy ADS-B ES 1090 frequencies. To gain more capacity in congested European airspaces, Eurocontrol has tightened the channel spacing from the standard 25 kHz to 8.33 kHz[2], but the spectrum is a finite resource.
There are various technical challenges to delivering the needed performance in terms of capacity, latency, bandwidth, coverage, cost or weight. Currently, no single technology can clearly meet all the challenges we are facing today. Therefore, technology agnostic and performance-based communications standards need to be agreed, and technologies proven, to allow the roll-out of BVLOS.
Shaping standards on command and control
The Control and Non-Payload Communications (CNPC) link is a vital technology element to drone integration that carries significant safety implications. It can support surveillance (drone’s position reported through the CNPC link) and may underpin Detect and Avoid (DAA) functions (assuming 5G is designed in the same way as for automotive technology).
When I conducted research on CNCP link standardisation back in 2019, the results were disappointing in that no standards had been established at that point.
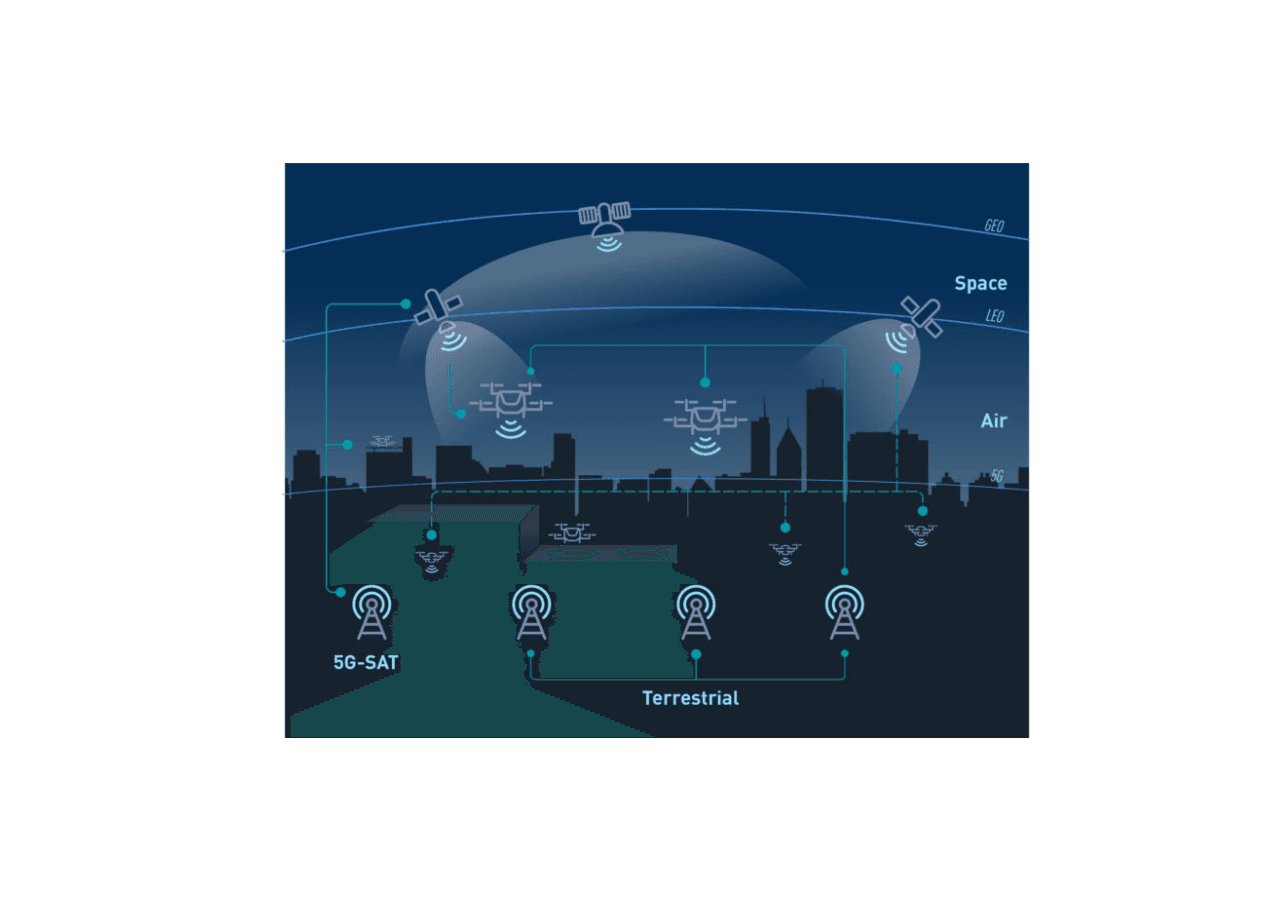
Since then, the RTCA in the US has developed a standard for CNPC link LOS operations[3] (medium and large drones) in the urban environment. The standard however applies only to air-to-ground links (LOS) links. In remote areas where ground stations are unavailable the CNPC link has to be satellite-based. There are multiple choices of satellite orbits (eg low or geosynchronous) having implications on latency, handover or link budget. A satellite-based BLOS standard is still under development.